Spherical Rolling Robots
Research project: Analysis and design of round rolling robots.
This work is a literature research project on rolling robots. I identify three main principles that can be used to achieve motion with rolling robots:
- Using the large angular momentum of gyroscopes for stabilization and torque amplification,
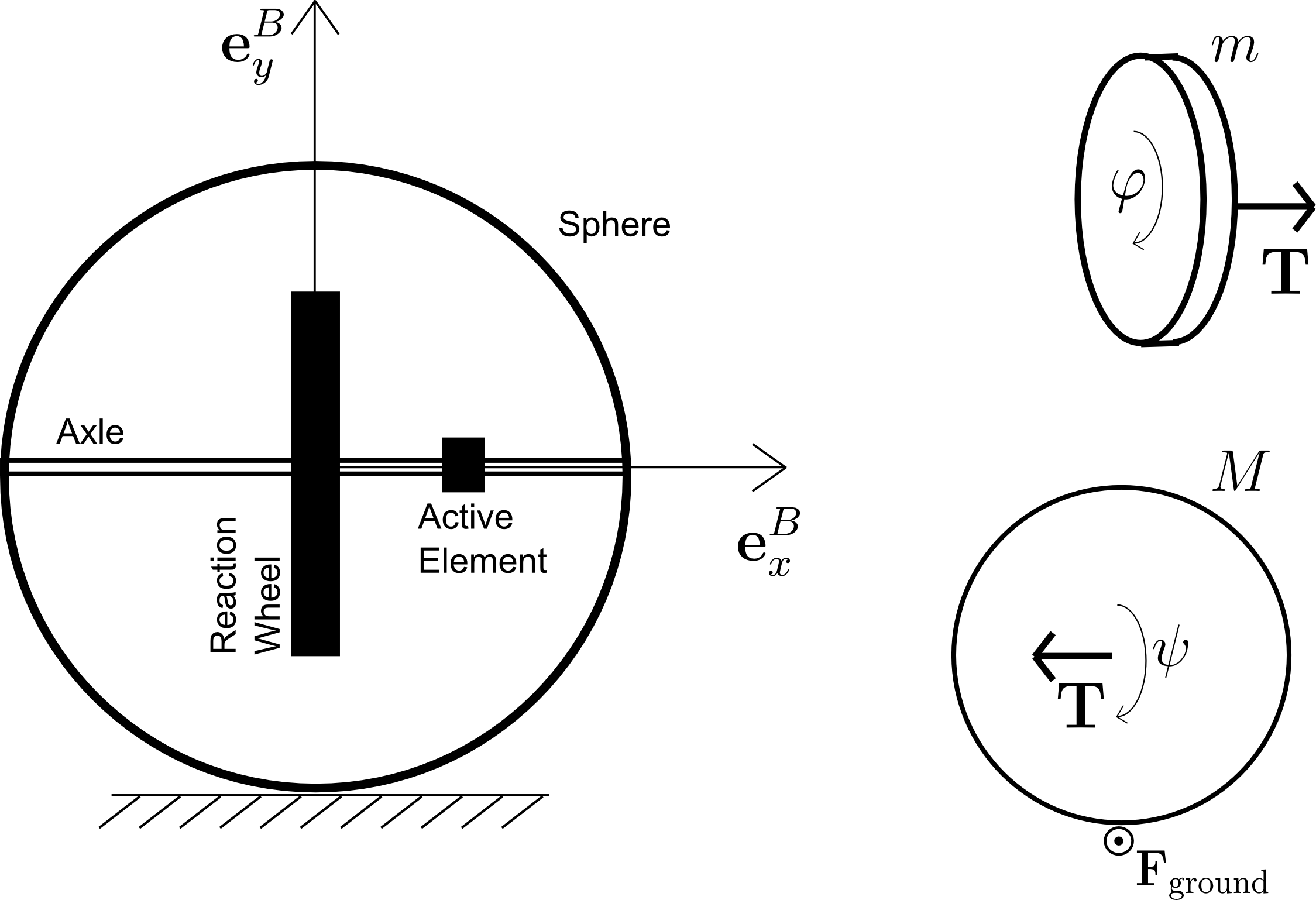
- manipulating the internal angular momentum by means of reaction wheels, and
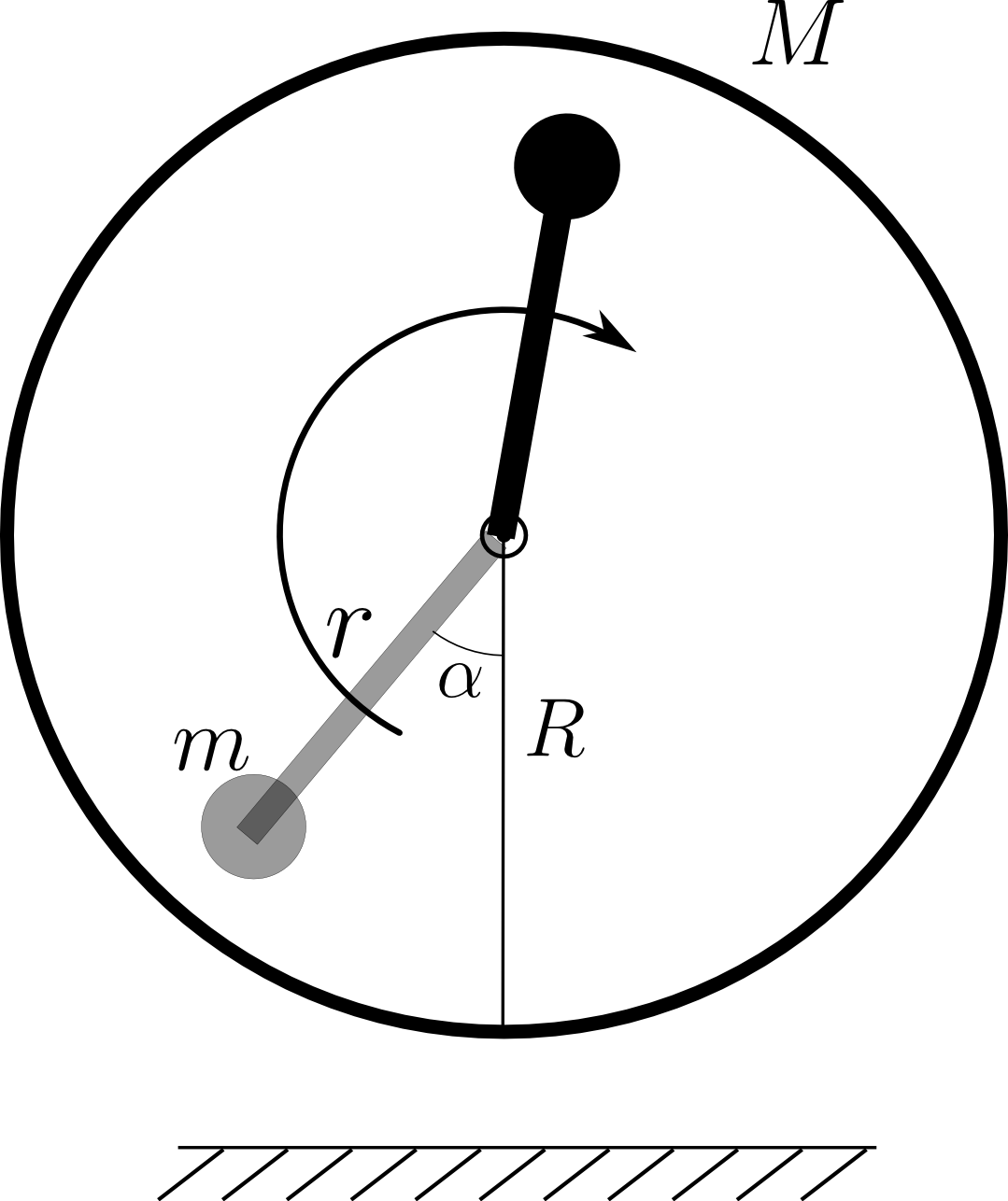
- taking advantage of a gravitational induced torque when the center of gravity lies outside the contact point.
Through modeling and simulation, I show that a gyroscope is capable of producing the largest torques, however a center of mass shift is superior when it comes to supplying a constant torque over a longer period of time. Reaction wheels are suitable for storing and releasing momentum.
This project allowed me to gain experience in modeling and simulation of dynamic systems. I also gained a good overview over the field or round rolling robots, typical solutions and shortcomings.
This knowledge laid the groundwork for my bachelor’s thesis by providing the first sketches of a new combined design of the above propulsion principles.